

Click here to read the article about creating ELA.

THE PROBLEM: Translating Cognitive Intent into Safe Kinematic Action
For patients with severe motor impairments (SCI, Stroke, ALS), the bottleneck to autonomy is the loss of the physical link between the brain and the environment. In assistive robotics, the core engineering challenge is Signal Integrity: non-invasive EEG data is inherently high-noise and stochastic. To make the ELA Humanoid a viable assistive platform, we needed to architect a system that could classify neural intent with high accuracy and translate it into deterministic, fail-safe robotic movements without relying on muscular input.
THE SOLUTION: Multi-Layered Signal Processing & Deterministic Architecture
As the Senior Systems Lead, I engineered a bio-cybernetic loop that partitioned high-level “intent extraction” from low-level “safety-critical execution.” This architecture mirrors the strict IEC 62304 standards for medical device software.
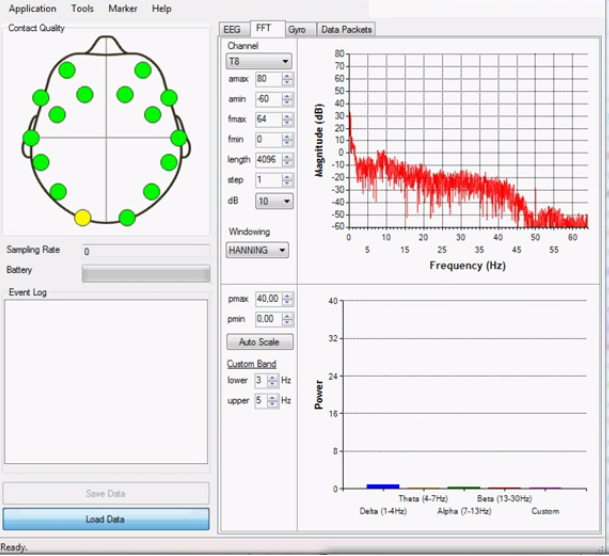
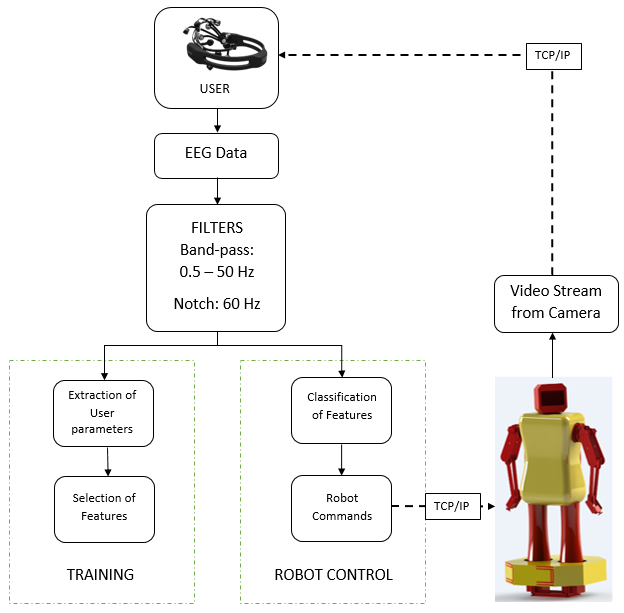
Signal Acquisition & Pre-processing:
I utilized a non-invasive Emotiv EEG headset for multi-channel neural data capture. I implemented digital filtering and artifact rejection to isolate cognitive features from ocular and muscular noise.
Intent Classification:
I developed a threshold-based classification algorithm on a Raspberry Pi (Python) to map mental states to discrete command strings, reducing the cognitive load on the user.
System Partitioning:
I architected a Master-Slave communication protocol where the neural “Intent” was passed to an Arduino (C++) for deterministic motor control. This ensured that even if the high-level software lagged, the low-level hardware maintained safe operating limits.
Closed-Loop Feedback:
Integrated the robot’s LCD HMI to provide real-time visual confirmation of classified intent—a critical factor in neuroplasticity and user-training for rehabilitation.
THE IMPACT: 75% Classification Accuracy & Clinical Validation Path
The integration transformed the humanoid from a pre-programmed robot into a true assistive “Digital Twin” of the user’s intent.
Performance Metric:
Achieved a command classification accuracy above 75% using consumer-grade EEG hardware, proving the viability of low-cost assistive interfaces.
Risk Mitigation:
Successfully demonstrated “Thought-to-Motion” navigation and 6-DOF arm manipulation with zero safety violations, thanks to the fail-safe firmware logic.
NPD Foundation:
This project serves as a foundational case study for Neurorehabilitation and Smart Prosthetics, proving that robust signal processing can overcome hardware variability in regulated MedTech environments.

* This neural integration was validated using the structural safety protocols detailed in the ELA Simulation Study.”


